
George Erol Fouché
Senior Software Engineer | 10+ Years Experience
Backend Gaming AI & Data Engineering
Open to New Opportunities
San Francisco Bay Area
👨🏿💻 About Me
I'm a Senior Software Engineer with 10+ years of experience specializing in Backend Development, Data Engineering, and Robotics/AI. Most recently at Series Entertainment (Gaming AI Startup), I have a proven track record of leading teams and delivering scalable solutions across Gaming, AI, Cybersecurity, and Enterprise environments.
🎓 Education & Certifications
- B.S. Computer Engineering - Pennsylvania State University
- Minor: Nanotechnology
- Certificate: International Engineering
- Udacity Nanodegree: Robotic Software Engineer
- Udacity Nanodegree: Full Stack Web Developer
Robotics & AI
Data Engineering
Backend Development
Mobile & Frontend
Client Work
Production Applications Built for Real Businesses
🍕 SLIVER Pizzeria
Full-Stack Restaurant Platform • Bay Area Sourdough Crust Pizzeria
Web Platform & Operations Dashboard
A modern, full-stack restaurant website built for SLIVER Pizzeria — a beloved Bay Area vegetarian pizzeria with 6 locations. Features a beautiful customer-facing site and a powerful admin dashboard for managing daily operations.
🎯 Key Features:
- Public Website: Modern responsive homepage, 6 Bay Area locations, delivery partner integration
- Pizza of the Day: Dynamic daily specials with image uploads and location-specific pricing
- Admin Dashboard: JWT authentication, pizza management, location updates
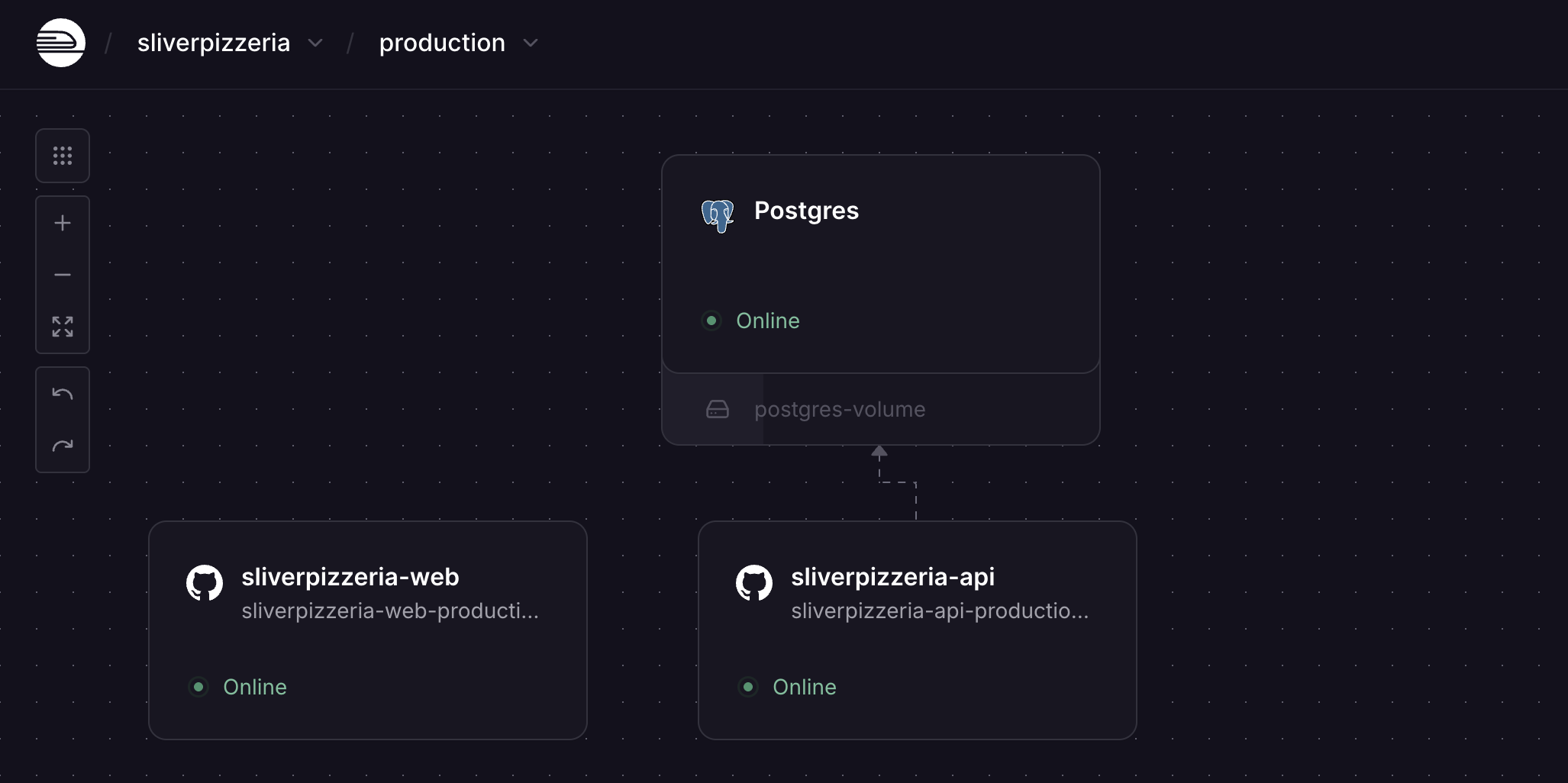
- Infrastructure: Docker containerization, Railway deployment, CI/CD pipeline
Web Experience
Mobile Responsive
🔐 Admin Dashboard & API
Secure admin panel for restaurant staff to manage daily operations including Pizza of the Day updates, location management, and real-time content updates.
🚀 DevOps & Deployment
Production-ready infrastructure with containerized development, automated deployments, and cloud-native architecture for scalability and reliability.
About SLIVER Pizzeria
"An experiment in culinary happiness" — SLIVER offers a healthier alternative focusing on fresh produce, 100% vegetarian with sourdough crust pizza. Family owned & operated with 6 Bay Area locations serving Berkeley, Oakland, Lafayette, and Fremont.
🍷 Vintage Wine
Mobile Wine Club & E-Commerce Platform • Barnyard Wine Bar

Vintage — Wine Recommendation & Club
A modern mobile app built for Barnyard Wine Bar — featuring wine discovery, user reviews, shopping cart, and an integrated Epic Society wine club with Stripe-powered subscriptions and AI-powered recommendations.
🎯 Key Features:
- Wine Discovery: Detailed profiles, tasting notes, and user reviews
- E-Commerce: Shopping cart, favorites, and order history
- Epic Society Club: Membership tiers (Corks Crew, Curator) with preferences
- AI Recommendations: Personalized wine suggestions based on taste profile
Wine Discovery & Cart
AI Recommendations
Backend & Payments
- ✓ Stripe subscription integration
- ✓ JWT-based authentication
- ✓ Wine inventory management
- ✓ Member preference tracking
Epic Society Wine Club
- ✓ Corks Crew & Curator tiers
- ✓ Mixed, Red, or White preferences
- ✓ Shipment tracking dashboard
- ✓ Member discounts & early access
About Barnyard Wine Bar
"Where every glass tells a story" — Barnyard Wine Bar brings curated wine experiences to wine enthusiasts through their Epic Society wine club. Members enjoy personalized selections, exclusive tastings, and a community of fellow wine lovers.
Robotics & AI Projects
🚁 Deep Learning Drone Simulator
Train a neural network for a "follow me" feature in drones, with applications in autonomous vehicles and industrial robotics.
🎯 Key Features:
- Real-time object tracking and following
- Custom neural network architecture
- Simulation environment for safe testing
- Applicable to various autonomous systems
🔍 Search And Sample Rover
Autonomous rover that navigates and maps terrains using real-time camera images for guidance and sample collection.
🎯 Key Features:
- Real-time terrain mapping and navigation
- Computer vision-based object detection
- Autonomous sample collection
- Path planning and obstacle avoidance
🦾 Robotic Perception
Tackles the challenge of object recognition and manipulation in cluttered environments, inspired by the Amazon Robotics Challenge.
🎯 Key Features:
- 3D point cloud processing
- Object recognition in cluttered scenes
- Robotic manipulation planning
- Real-world application scenarios
🦾 Robotic Arm Pick and Drop
Control a six-degree-of-freedom robotic arm to perform precise pick and drop actions using forward and inverse kinematics.
🎯 Key Features:
- 6-DOF robotic arm control
- Forward and inverse kinematics
- Precise manipulation tasks
- ROS-based control system
🚗 Self-Driving Car Behavioral Cloning
Learn driving behavior using deep neural networks to simulate real-world driving conditions in a test environment.
🎯 Key Features:
- Behavioral cloning with deep CNNs
- Real-time driving simulation
- Data augmentation techniques
- End-to-end learning approach

Data Pipeline Projects
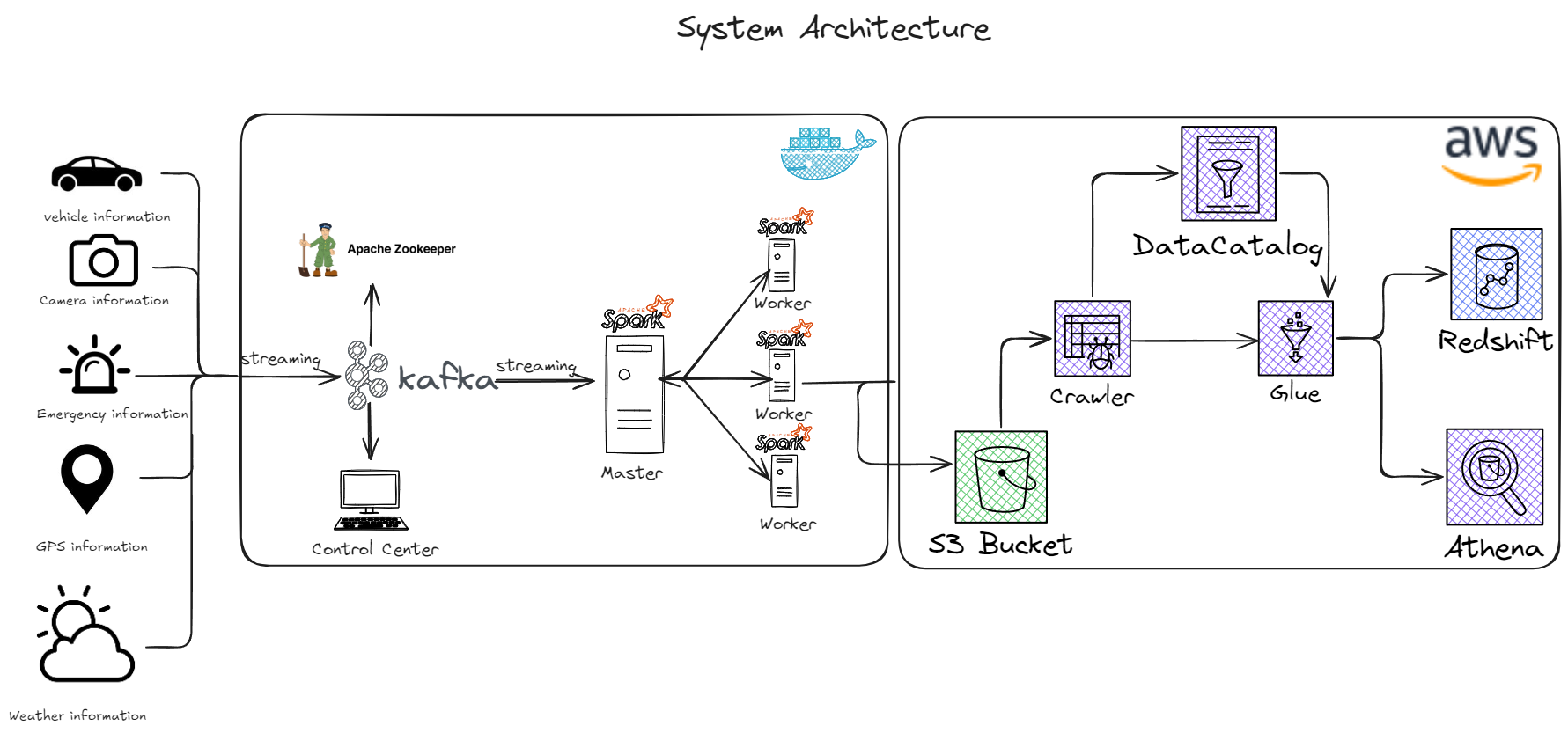
🌐 IOT AWS SPARK
Integrates Big Data, IoT, and cloud computing to enhance urban mobility using a 35-mile drive from San Francisco to Dublin, CA, as a case study.
🎯 Key Features:
- Real-time data processing for vehicle performance, GPS, weather, and traffic
- Scalable, fault-tolerant architecture
- Docker containerization for easy deployment
- AWS integration for storage and analytics
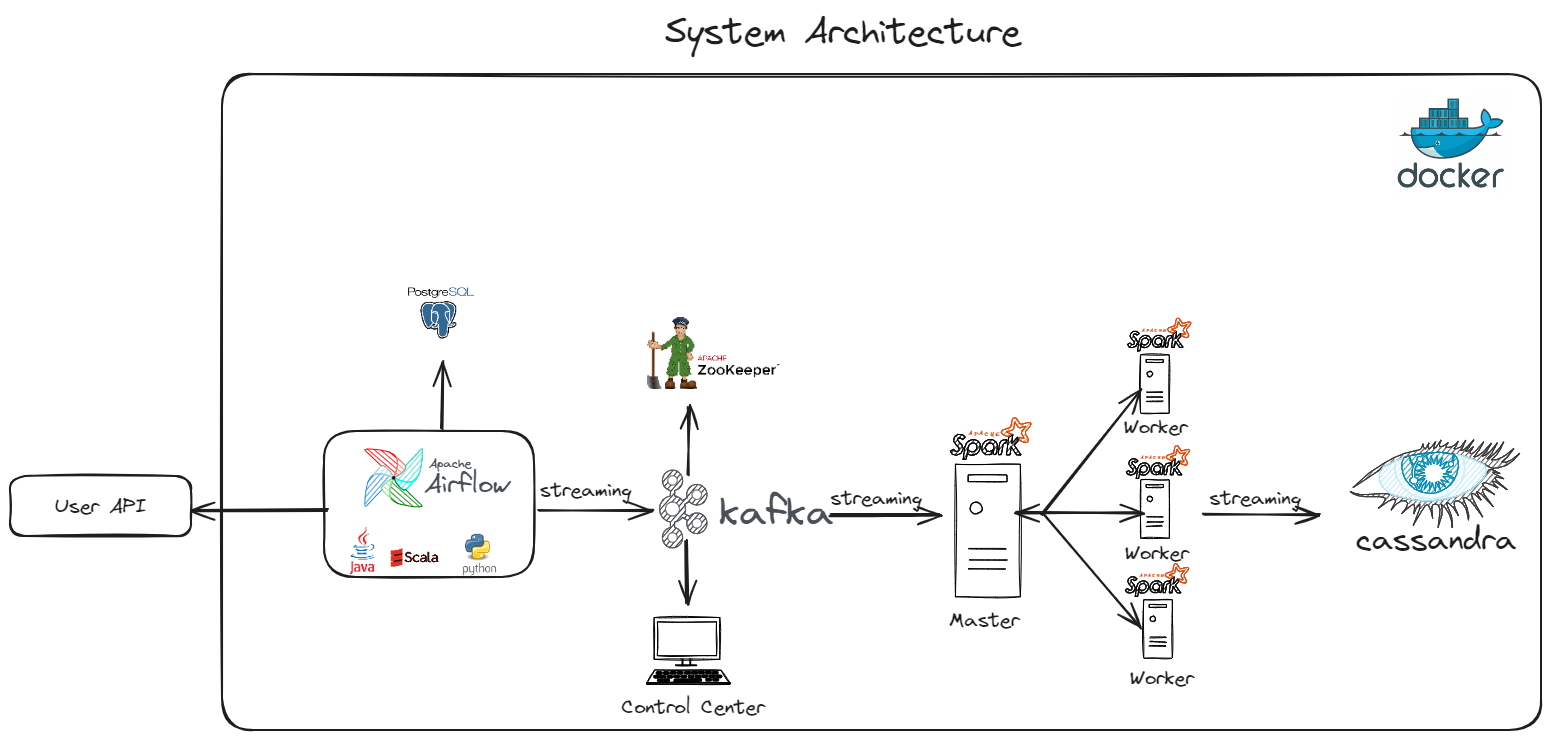
⚡ E2E Spark Flow
Comprehensive data pipeline utilizing Docker, Apache Airflow, Kafka, Spark, Cassandra, and PostgreSQL to manage data throughout its entire lifecycle.
🎯 Key Features:
- End-to-end data processing workflow
- Real-time streaming with Kafka
- Automated scheduling with Airflow
- Multi-database support (Cassandra + PostgreSQL)
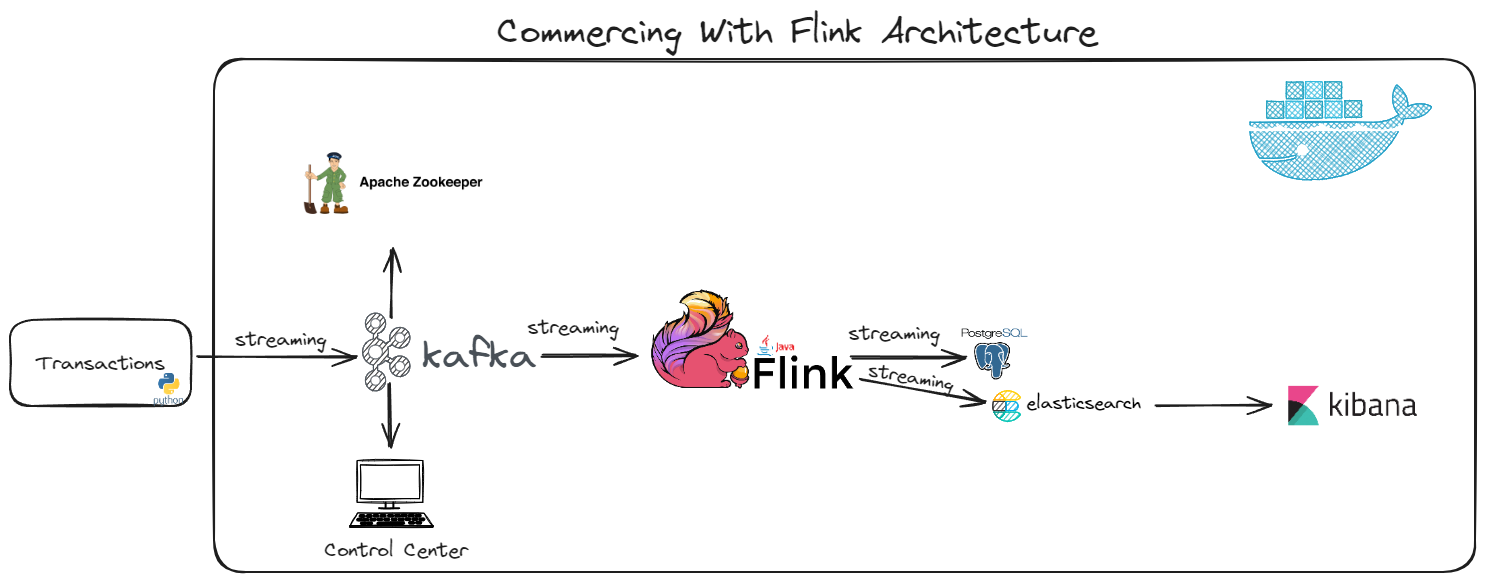
💰 Commercing With Flink
Real-time sales analytics application processing financial transactions with Apache Flink, executing complex aggregations and storing results for business analysis.
🎯 Key Features:
- Real-time financial transaction processing
- Complex event processing and aggregations
- Low-latency analytics for business insights
- Scalable stream processing architecture
Full Stack Web Development
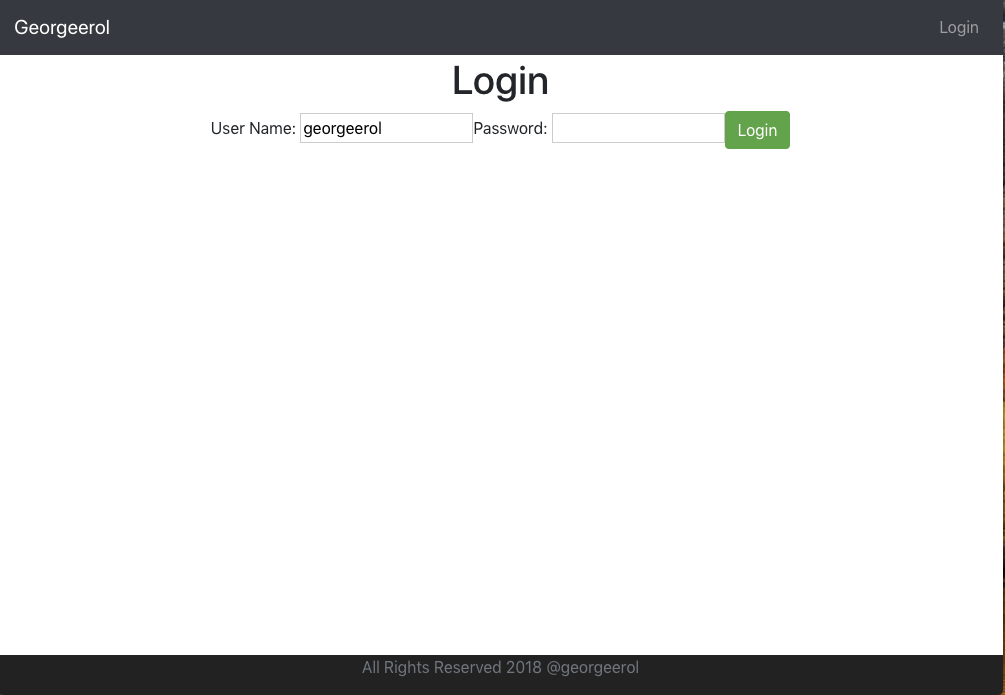
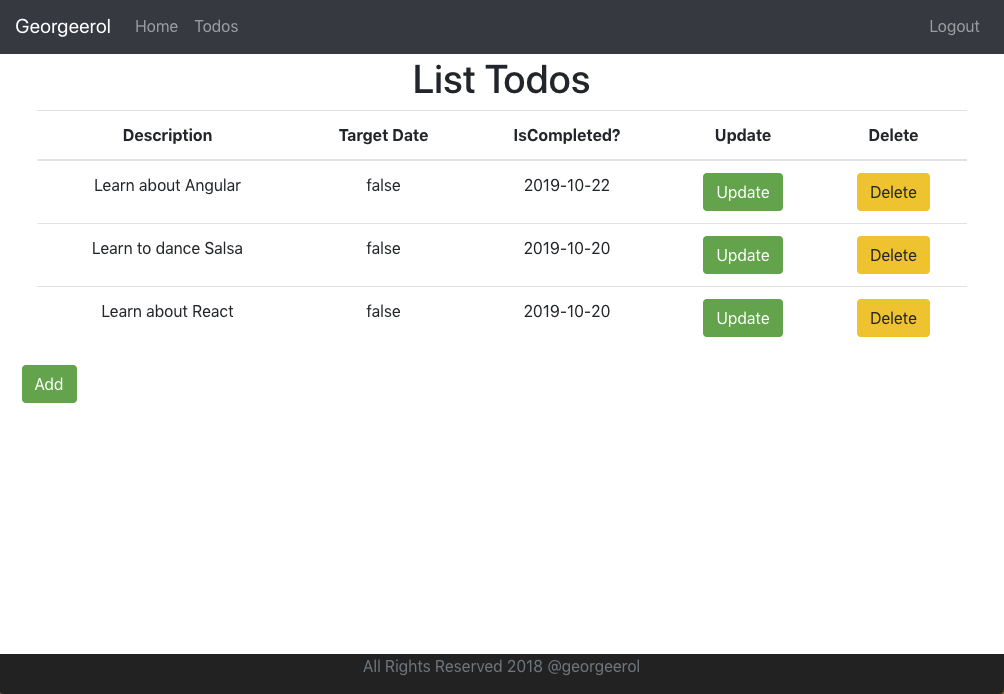
✅ Todo Application
Comprehensive task management application with React frontend and Spring Boot backend, featuring user authentication and task organization.
🎯 Key Features:
- User authentication and authorization
- CRUD operations for task management
- Responsive React frontend
- RESTful API with Spring Boot
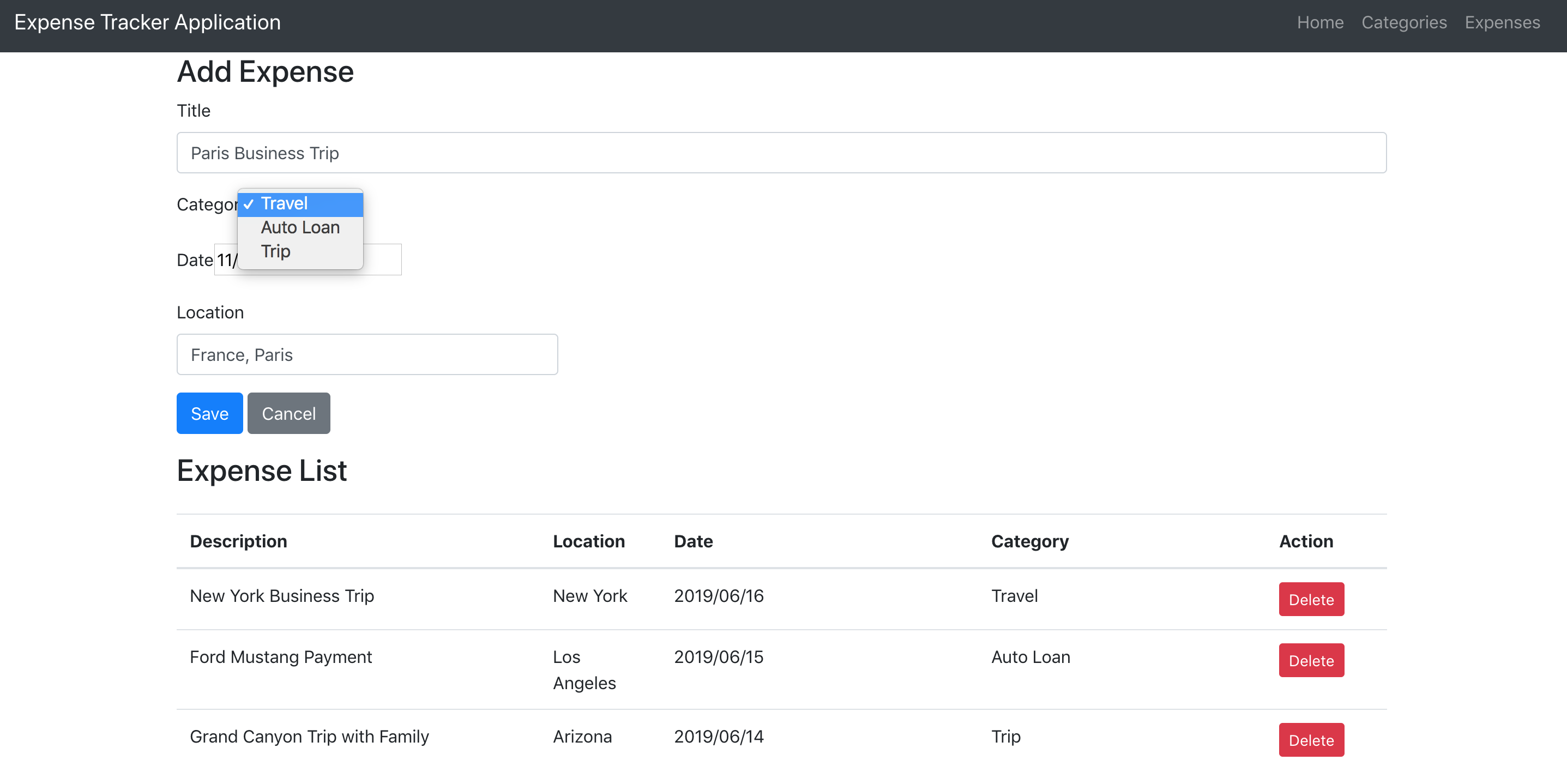
💰 Expense Tracker
Track and manage personal expenses with an intuitive web application featuring data visualization and budget management.
🎯 Key Features:
- Expense tracking and categorization
- Budget management and alerts
- Data visualization with charts
- Export and import functionality
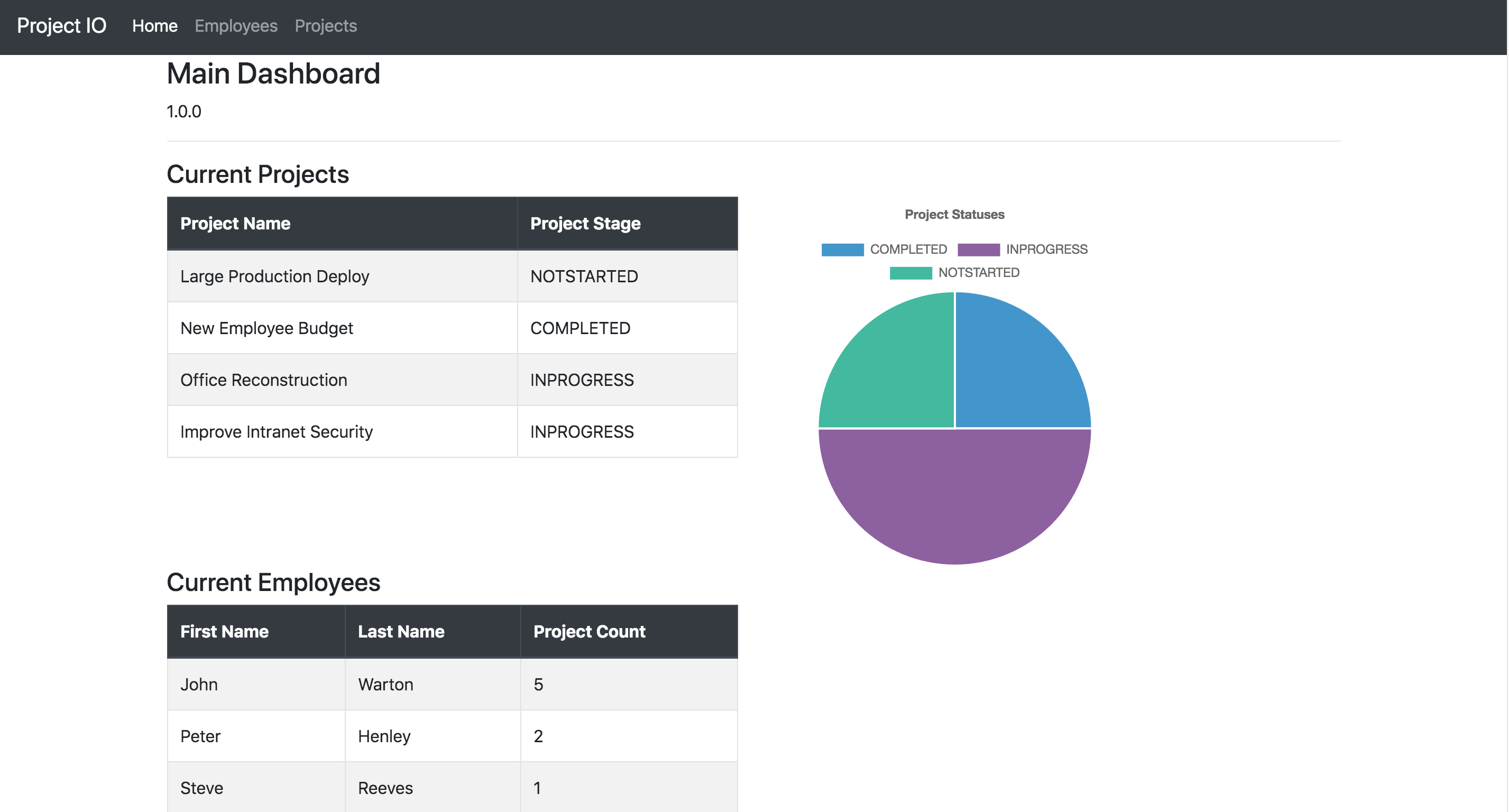
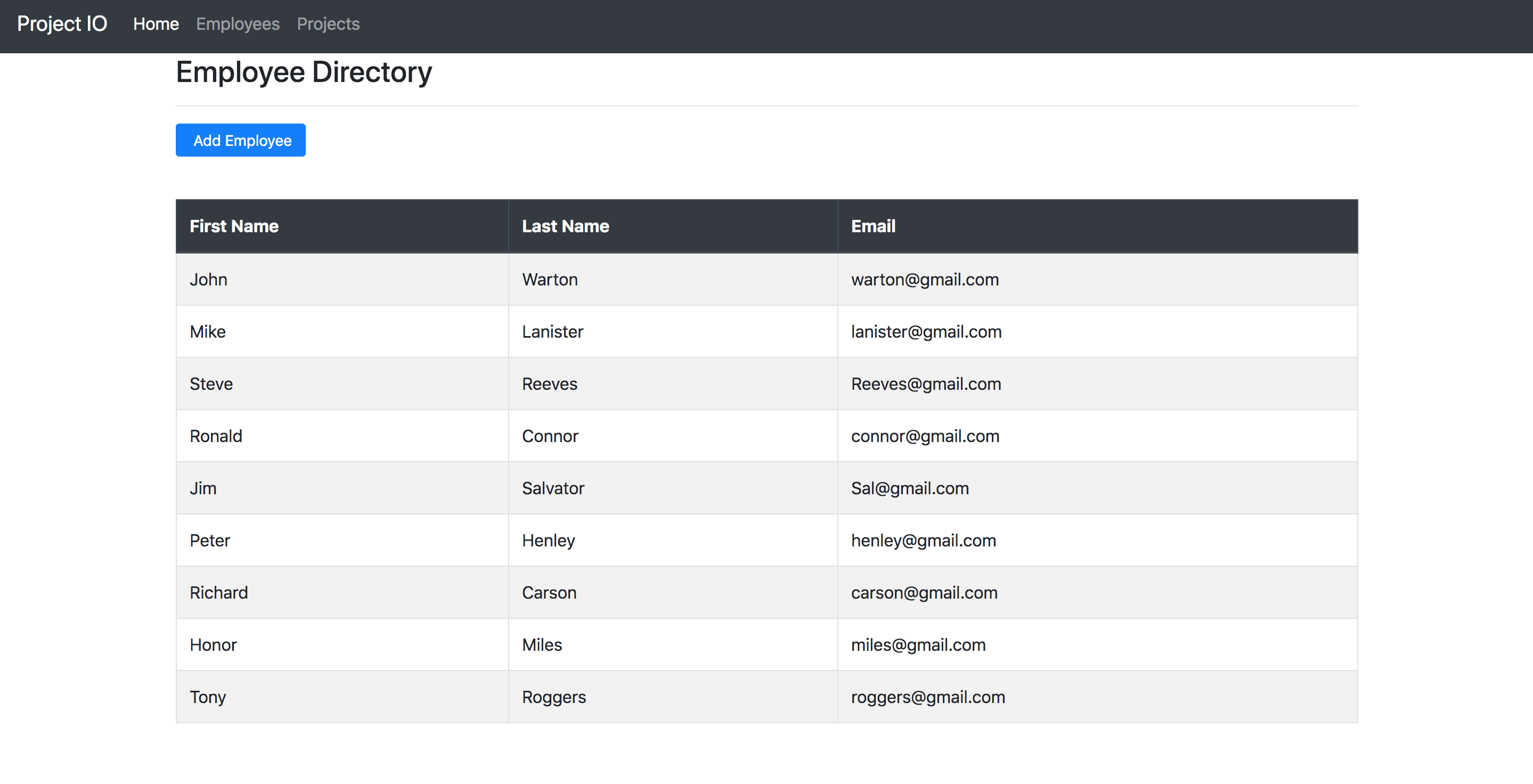
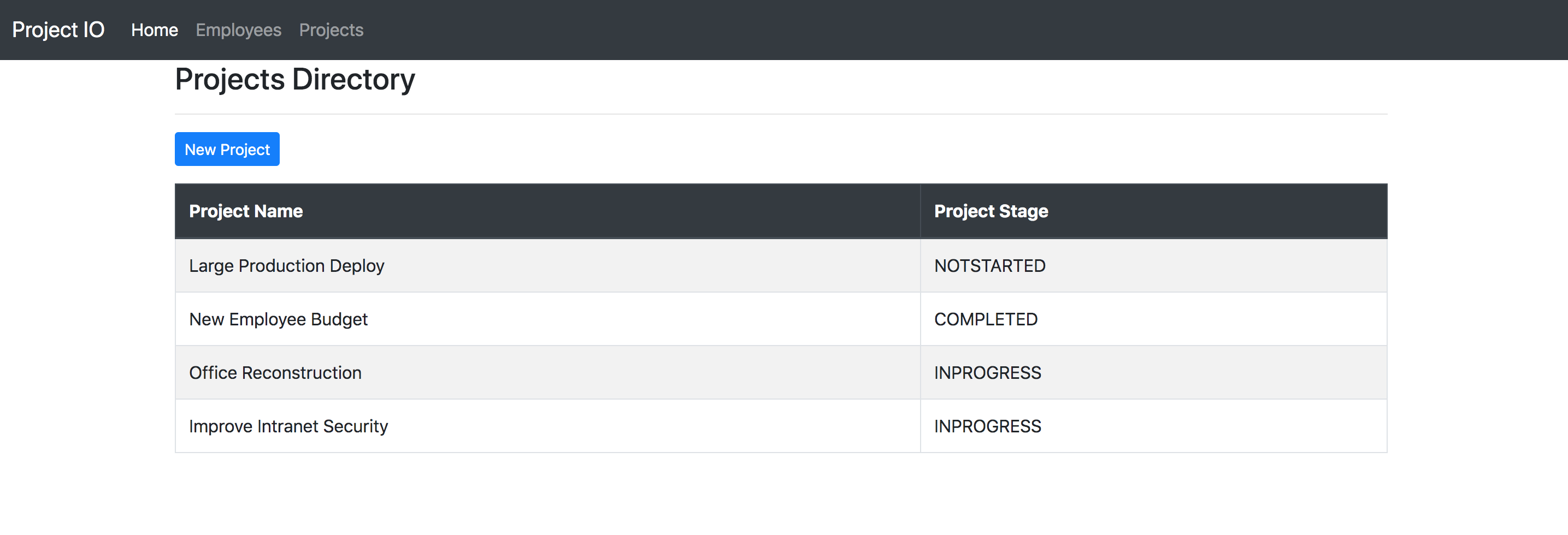
📋 Project Management System
Comprehensive program management tool with server-side rendering for efficient project and team management in enterprise environments.
🎯 Key Features:
- Project lifecycle management
- Team member assignment and tracking
- Resource allocation and planning
- Progress reporting and analytics
Mobile Development
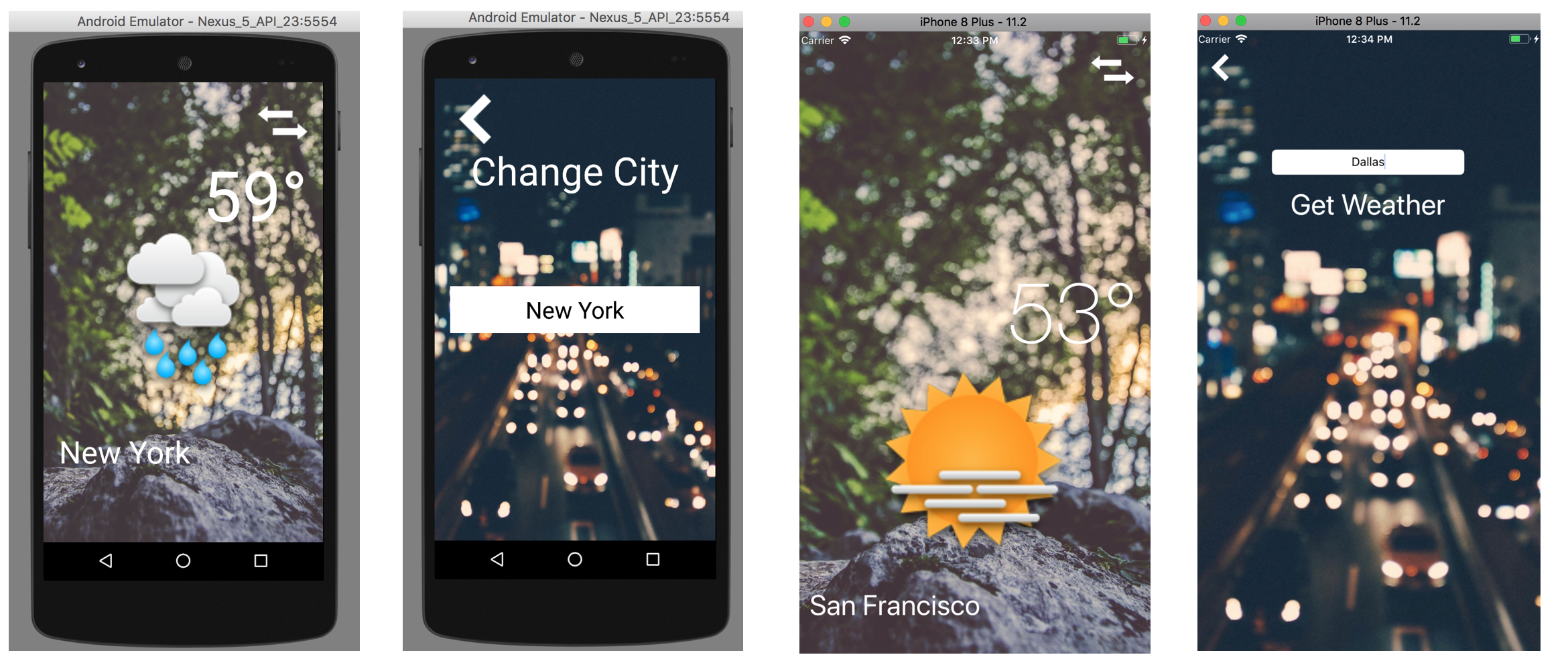
🌤️ Weather App
Cross-platform weather application providing real-time weather updates with beautiful UI for both Android and iOS devices.
🎯 Key Features:
- Real-time weather data integration
- Location-based forecasting
- Beautiful, intuitive UI design
- Cross-platform compatibility
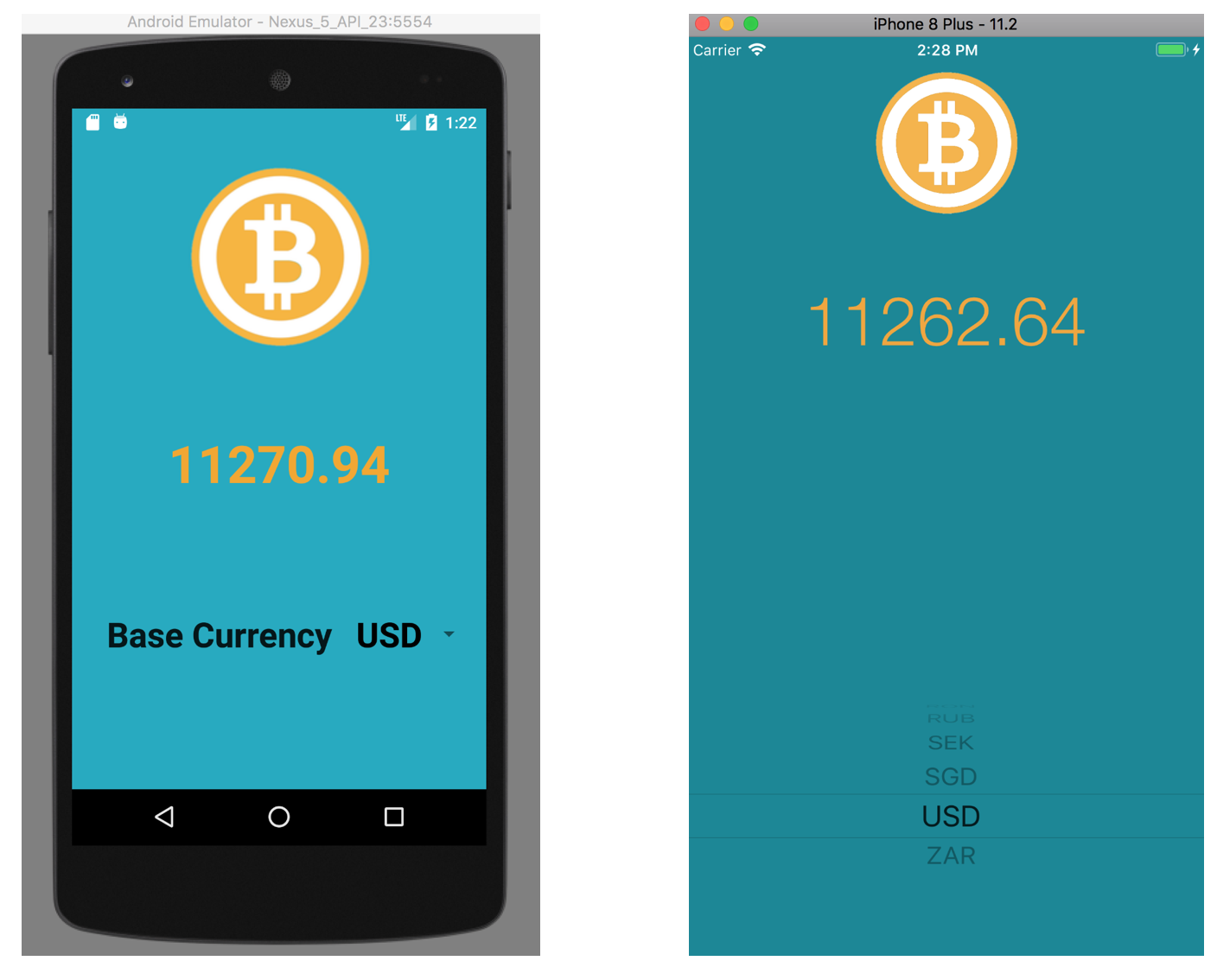
₿ Bitcoin Ticker
Monitor and display live Bitcoin exchange rates with real-time updates on both Android and iOS devices.
🎯 Key Features:
- Live Bitcoin price tracking
- Multiple exchange support
- Real-time market updates
- Clean, modern interface
Let's Connect
I'm always interested in discussing new opportunities, innovative projects, or just connecting with fellow tech enthusiasts!